برای ساخت یک روبات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشید.
مکانیک

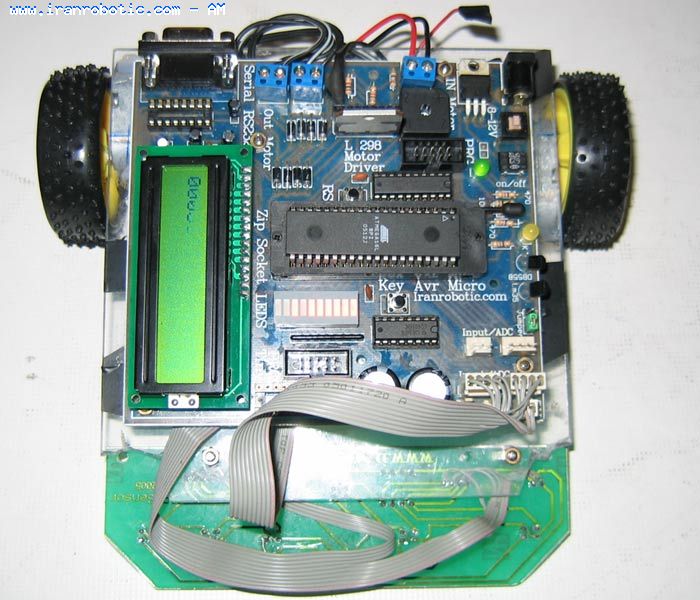
یک روبات مسیر یاب از 4 بخش تشکیل شده است که به بررسی هر کدام می پردازیم.
1- شاسی یا بدنه که تمام اجزای روبات مانند برد ها و ... روی آن قرار می گیرد.
2- موتور روبات مسیر یاب
3- چرخ روبات مسیر یاب
4- برد سنسور که وظیفه تشخیص خط زیر روبات را بر عهده دارد.
شاسی یا بدنه
این قسمت از مکانیک روبات مسیر یاب که وظیفه نگهداری تمام اجزا و مدار ها رابر روی خود دارد. که اجزای روبات بر روی آن بسته می شوند و می تواند یک تلخ پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند باشد.
موتور یک روبات مسیریاب




یک روبات می تواند از دو نوع موتور استفاده کند که عبارت است از :
DC MOTOR
Steper Motor
شما برای یک روبات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه می شود این موتور ها را در عقب روبات نصب کنید.
یک روبات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که روبات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتوانستید این موتور را تهیه کنید می توانید از یک آلمیچر که در اسباب بازیها استفاده می شود استفاده کنید به شرطی که یک عدد گیر باکس بر سر راه آن بگذارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم می باشد ) توصیه میکنم این موتور ها را از این سایت که موتور های خوبی برای این کار دارد و هم ایرانیست هم خیلی سریع بدست شما میرسد تهیه کنید :
www.Shop.Farsitools.com Is Shoping Robotic
چرخ ها
در ساخت این روبات باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از :
-1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطعکاک چرخ با زمین
1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی می کند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور روبات مسیر کمتری را طی می کند.
2- اندازه عرض چرخ : توصیه می شود اندازه عرض چرخ برای این کار بین 1 تا 2 سانتیمترانتخاب شود چون اگر بیشتر از این باشد اصطعکاک و وزن آن خیلی زیادی می شود .
3- برای اصطعکاک چرخ با زمین می توانید از نوار چسب برقی از طرف چسبندگی به زمین استفاده کنید که این کار لاستیک ها را بیشتر به زمین می چسباند و تا حدی می تواند به تعادل روبات کمک کند .
چرخ هرز گرد :
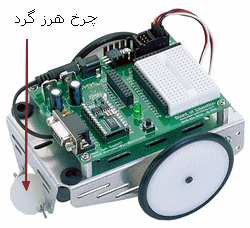
این چرخ که در قست میانی و جلوی روبات نصب می شود و وظیفه حفظ تعادل روبات را دارد و باید کمترین اصطعکاک را با زمین داشته باشد که می توان از یک بلبرینگ یا یک عدد ساچمه و یا ... استفاده کرد.
برد سنسور ( حسگر )


این بخش از روبات که یکی ار مهمترین قسمت های یک روبات محسوب می شود و وظیفه تشخیص خط زیر روبات را دارد و باید فاصله استاندارد آن با زمین رعایت شود تا بهترین بازده را دارا باشد.
و چند نکته که باید در مکانیک روبات رعایت شود :
1- حتما مکانیک روبات محکم بسته شود.
2- اگر از چسب برای بستن استفاده می کنید حتما به همراه بست استفاده شود .
3- برای بستن برد ها به بدنه ( شاسی ) حتما از پیچ و مهره یا Spacer و مهره استفاده کنید .
4- برای محکم شدن و جلوگیری ازشل یا باز شدن اتصالات می توانید از واشر فنری استفاده کنید .
5- در جاهایی که ممکن است پیچ و مهره باعث اتصالات بین قطعات شود می توانید از واشر فیبری استفاده کنید .
بازدید دیروز: 2
کل بازدید :23278

دانشجوی مهندسی برق - الکترونیک دانشگاه آزاد اسلامی مهریز
امیر طهماسبی مکاترونیک
ایران روباتیک
آخرین قیمت سخت افزار
چکونه شبکه بیسیم راه اندازی کنیم
ساخت سنسور تشخیص رنگ
انجمن تخصصی ماهواره
چگونه هکر شوید
وزارت ارتباطات و فن آوری
پروژه های پاسکال
تصاویر روباتها
کتاب هک
طراحی وب برای شما
وبلاگ تخصصی برق
نواع مدارات با توضیح کامل
دنیای سیگنال
plc
دانشگاه استنفورد
کد جاوا
شیطنت بازی در اینترنت
مشهد کیت
کوچکترین فلش درایو
اتصال 2 کامپیوتر به صورت بی سیم
10 زبان برنامه نویسی که باید آموخت
سایت خرید قطعات الکترونیکی
مدار چاپی زدن
تازه های هک
قطعا سخت افزاری
آموزش کار با پورتها
 " alt="برنامه و تم برای موبایل - به روز رسانی : 1:50 ع 86/11/26" width='85' >
" alt="برنامه و تم برای موبایل - به روز رسانی : 1:50 ع 86/11/26" width='85' >

